
معرفی سرویسهای تحلیل داده مایکروسافت
برای باقی ماندن و راضی نگه داشتن کاربران در دنیای بسیار رقابتی امروز نیاز به سرعت بالای پردازش اطلاعات و شناسایی سریع گلوگاه ها و برطرف کردن آنها هستیم. مثالهای زیر بخوبی اهمیت این مساله را بازگو می کنند :
- کاربران سایت شما، عکسهای مختلفی را آپلود می کنند و قبل از انتشار عمومی آنها باید تک تک بررسی شوند که مشکل قانونی برای انتشار نداشته باشند
- برای ثبت نام کاربران، عکس پروفایل آنها را باید دریافت کنید اما این عکس باید حتماً شرایط خاصی داشته باشد مثلاً پشت زمینه آن روشن و بدون عینک و … باشد
- می خواهید کاربران سایتتان را در انتخاب منوی غذا راهنمایی کنید چه به صورت چت و چه به صورت صوتی .
- نظرات مختلفی که در سایت شما روزانه وارد میشوند نیاز به تحلیل دارند بخصوص زمانی که نارضایتی از یک محصول فراگیر میشود باید سریعاً در جریان قرار بگیرید اما اگر هزاران محصول مختلف داشته باشید، بررسی تک تک نظرات به صورت دستی ، کار عاقلانه ای نخواهد بود .
- قصد طراحی سرویسی را دارید که متن های داخل یک عکس را برایتان استخراج کند یا عکسهای مختلف ارسالی کاربران را برایتان گروه بندی کند .
- می خواهید عکس های ارسالی را کراپ کنید اما برای برش دقیق عکس به گونه ای که اطلاعات اصلی عکس باقی بماند، نیاز به بازبینی انسانی دارید .
- روزانه تماس های مختلفی با واحد پشتیبانی شرکت شما گرفته میشود و می خواهید ببینید که در کدام یک از مکالمات صدای طرفین بالا رفته است تا بتوانید جلوی تکرار آنرا بگیرید.
مثالهای بالا گوشه ای از نیازهای رو به رشد سامانه های اطلاعاتی در دنیای معاصر است که در همه آنها پردازش متن یا صدا یا ویدئو بخشی از راه حل خواهد بود. برای انجام هر کدام از موارد بالا، علاوه بر وجود یک تیم متخصص، نیاز به سرورهای قوی و امکانات سخت افزاری هم داریم . هر چند ممکن است تا زمانی که الگوریتم مناسب را بیابیم و تست کنیم، بازار را از دست بدهیم و یا با هزینه بسیار بالایی به این مهم دست یابیم .
چندسالیست که شرکتهای بزرگ دنیا مانند مایکروسافت، گوگل ، IBM و آمازون، سرویسهای تحلیل و پردازش داده خود را به صورت آنلاین و مبتنی بر رایانش ابری ارائه کرده اند تا شرکتها و سازمانهای نیازمند به انواع الگوریتمهای یادگیری ماشین و هوش مصنوعی، تمام نیازهای خود را با صدازدن چند سرویس ساده و بدون درگیر شدن در جزییات فنی آنها، به دست آورند. در این مقاله به سرویس جدید مایکروسافت به نام Cognitive Service می پردازیم
مقدمه ای بر اکوسیستم پردازشی مایکروسافت
مایکروسافت به عنوان یکی از شرکتهای پیشرو در زمینه رایانش ابری، چند سالیست علاوه بر سرویس پایه رایانش ابری آژور (Azure)، سرویسهای بسیار متنوعی را هم ارائه می کند از اجرای کانتینرهای داکر و اجرای ماشین های مجازی لینوکس تا انواع سرویسهای پردازش عکس و ویدئو و سرویسهای یادگیری ماشین و هوش مصنوعی. این سرویسها امروزه به ۶۷ سرویس مختلف می رسد که به کمک آنها می توانید تمام نیازهای ذخیره و پردازش داده خود را برطرف کنید. از بین این سرویسهای متنوع ، سه سرویس برای تحلیل و پردازش داده اهمیت ویژه ای دارند : سرویس یادگیری ماشین ، سرویس هوش تجاری کورتانا و سرویس علوم شناختی (Cognitive)
به این سه سرویس به صورت دقیق تر در ادامه نوشتار حاضر، می پردازیم.
سرویس هوش تجاری کورتانا
شالوده و محور سرویسهای داده مایکروسافت، سرویس کورتانا است که در حقیقت یک چارچوب و معماری کامل برای ذخیره سازی، پردازش و نمایش اطلاعات است و تمام سرویس های دیگر مایکروسافت در این زمینه، جزئی از این چهارچوب هستند .
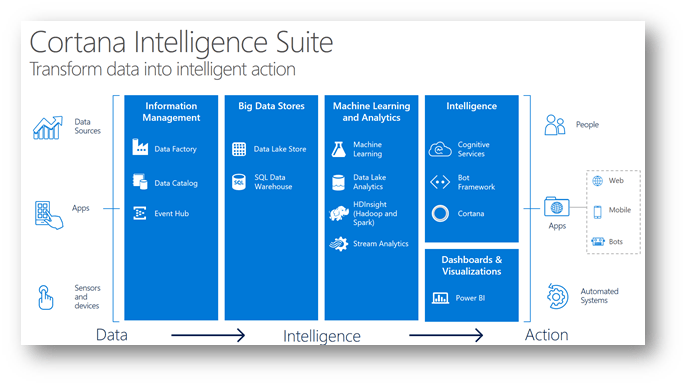
البته لیست محصولات کورتانا بسیار بیشتر از این تصویر فوق است که در این صفحه می توانید لیست کامل آنها را ببینید بخصوص امکاناتی که برای هدوپ و پردازش جریان و دریاچه های داده ارائه می کند قابل توجه است .
سرویس یادگیری ماشین
سرویس یادگیری ماشین هم بخشی از سرویس کورتانای مایکروسافت است که به کاربر یک استودیو و پنلی برای بارگزاری و پردازش داده های خود ارائه می دهد. کافیست با اکانت مایکروسافت خود (اکانتهای هات میل یا اوت لوک) وارد این استودیو شوید تا یک محیط یکپارچه پردازشی در اختیار شما قرار گیرد تا هم بتوانید داده های خود را بارگذاری کنید و هم مدلهای مختلف یادگیری ماشین خود را روی این داده ها امتحان کرده و در صورت موفقیت مدل، آنرا وارد فاز عملیاتی نمایید.
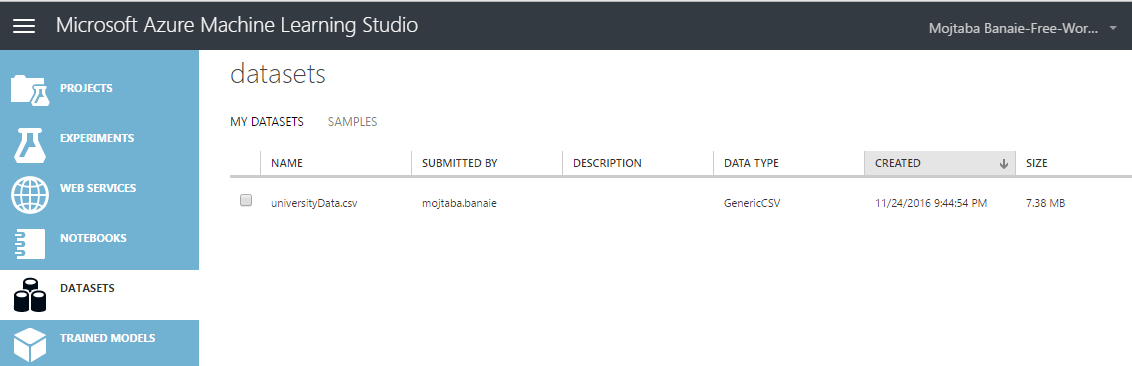
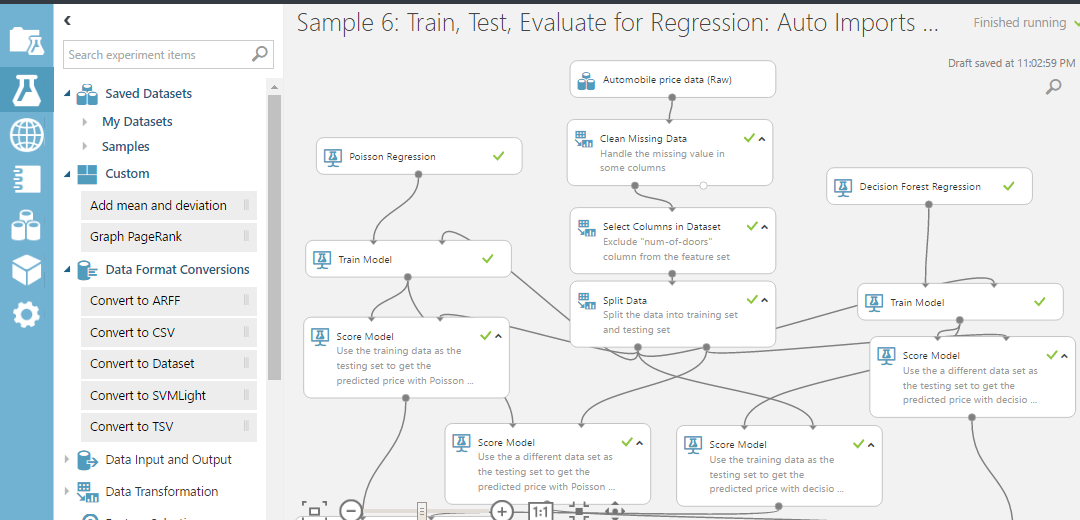
در این محیط می توانید یک پروژه ایجاد کنید، داده های خود را وارد کنید، وب سرویسهایی را به پروژه معرفی کنید و با کتابچه های پایتون و R به تحلیل داده های خود بپردازید اما بخش جذاب این محیط ، قسمت تجربه عملی اون هست با نام Experiment که به شما کمک می کنه روال کار خودتان را به صورت Drag and Drop و به صورت فلوچارتی طراحی کنید .
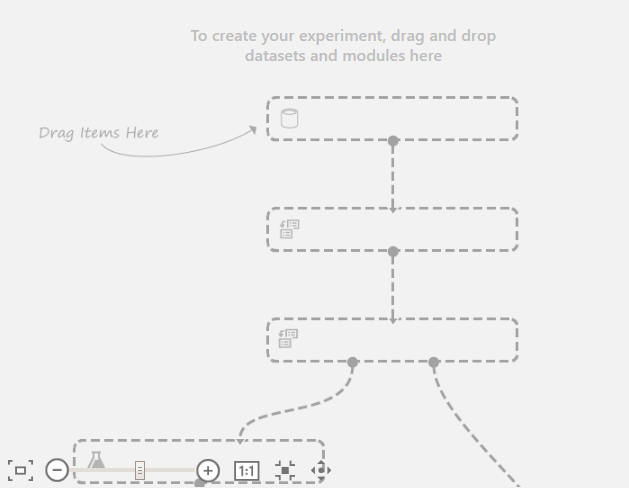
در هر بخش ازاین فلوچارت هم از سری کارها و الگوریتمهای آماده شده مایکروسافت می توانید انتخاب کرده و آنها را به سمت مستطیل مربوطه بکشید و رها کنید . بخشی از این لیست آماده را میتوانید در شکل زیر ببینید :
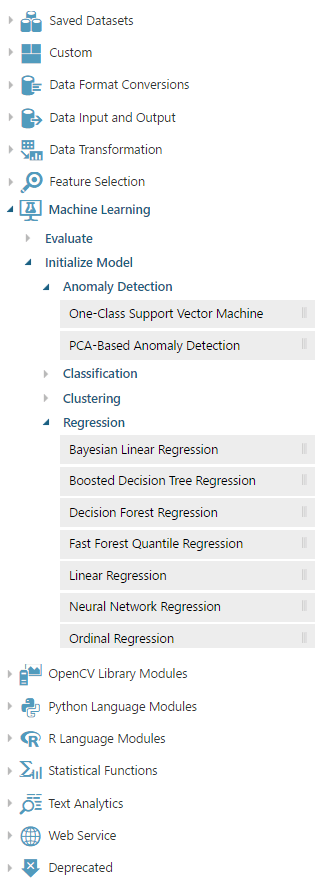
همانطور که می بینید لیست تقریباً کاملی از الگوریتم و کارهایی که ممکن است مورد نیاز شما باشد را در این فهرست میبینید که البته خودتان به کمک ماژول های برنامه نویسی می توانید هر جا که نیاز به الگوریتم یا کدنویسی خاص منظوره داشتید از آنها استفاده کنید . توصیه می کنم حتما مثالهای آماده مایکروسافت را مشاهده کنید . نمونه ای از مثالهای آماده مایکروسافت را در شکل زیر می توانید ببینید :
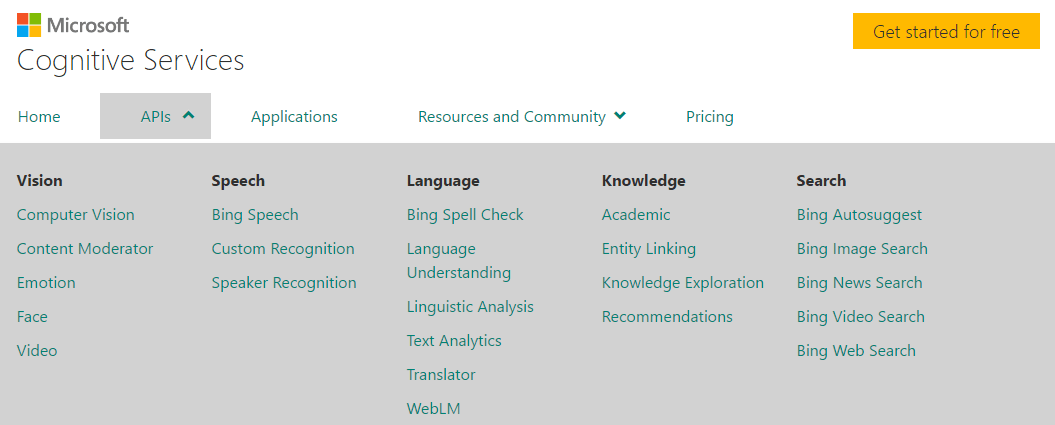
سرویس علوم شناختی Cognitive Service
یکی دیگر از سرویسهای پردازش داده جذاب و کاربردی مایکروسافت، سرویس علوم شناختی آن است که به کمک آن می توانید پردازش صدا ، متن ، تصویر ، ویدئو و بسیاری کارهای دیگر را به راحتی انجام دهید. این سرویسها که به صورت API ارائه می شود، به شما امکان این را میدهد که تنها با چند خط کد بتوانید سرویس مربوطه را از مایکروسافت فراخوانی کنید و جوابتان را به صورت لحظه ای وبلادرنگ دریافت کنید . امری که باعث میشود شما تمرکزتان را روی برنامه اصلیتان بگذارید و تمام کارهای پردازشی اصلی را به مایکروسافت بسپرید.
{kind=link}
بخش پردازش متن و تحلیل زبان طبیعی آن هنوز زبان فارسی را پشتیبانی نمی کند اما بخش پردازش تصویر آن را که تست کردم بسیار جذاب و دقیق بود. مثلا عکس دو تا دخترم را به این سرویس دادم و خروجی زیر را مشاهده کردم :
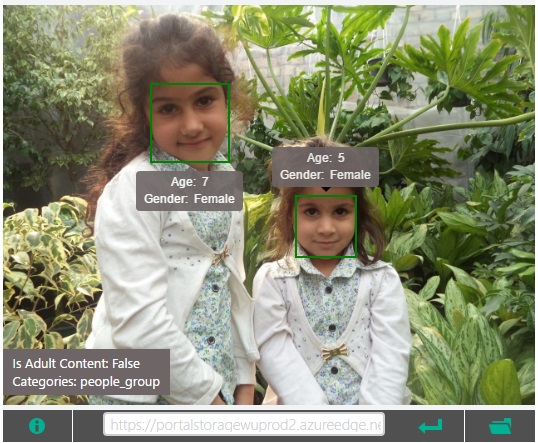
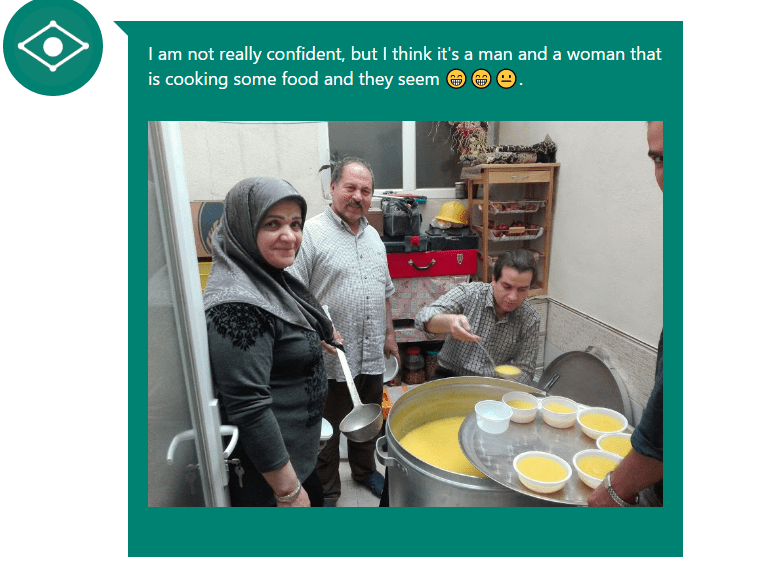
علاوه بر تشخیص موجودیت های حاضر در عکس و تشخیص چهره و سن اشخاص، دسته عکس و اینکه محتوای مستهجن دارد یا نه را هم تشخیص می دهد. عکسی از پخت شله زرد یکی از اقوام را هم که برای تحلیل به سرویس captionbot که توسط همین API مایکروسافت نوشته شده است دادم ، خروجی زیر را گرفتم :
و وقتی تصویر حسن روحانی و فرانسوا اولاند را آپلود کردم ، هر دو را تشخیص داد :

سرویس بات مایکروسافت هم آینده درخشانی دارد و حتماً در طراحی سامانه های اطلاعاتی آنرا هم درنظر بگیرید این که یک دستیار هوشمند مشابه یک انسان به راهنمایی مشتری بپردازد، با اون صحبت و یا چت کند و به جای شما شکایات و درخواستها را پذیرا باشد .